意念加AI算法「復原」每個手指,智能義肢登上Nature子刊封面
研究人員表示,他們提出的全新機械手臂控制方法,其關鍵優勢在於通過人類意圖和自動化算法共同進行操縱(shared control)——在需要高靈活性時,人類控制運動;當需要高魯棒性時,AI 算法則進行輔助。
在此前,科學家們對於機械臂控制研究很多,但充其量也只能控制單個手指,而且其研究成果也僅限於在四肢健全的人群中實現離線的「義肢控制」。
EPFL 提出的新系統,在神經學上的關鍵理念是對來自現有運動神經的信號進行解碼,這些運動神經旨在為手指發出活動的信號。這些信號(sEMG)收集自被截肢者殘肢的剩餘神經,並被轉換成假肢單個手指的運動信號,這種效果在之前的假肢研究中未能實現。得益於機器人技術,機械手可以幫助被截肢者抓起物體並能夠維持些許時間,從而以一種真實的方式操控物體。
研究者首先提出了一個使用多層感知器(MLP)的運動比例解碼器,該解碼器允許穿戴者同時、連續地控制每個手指。
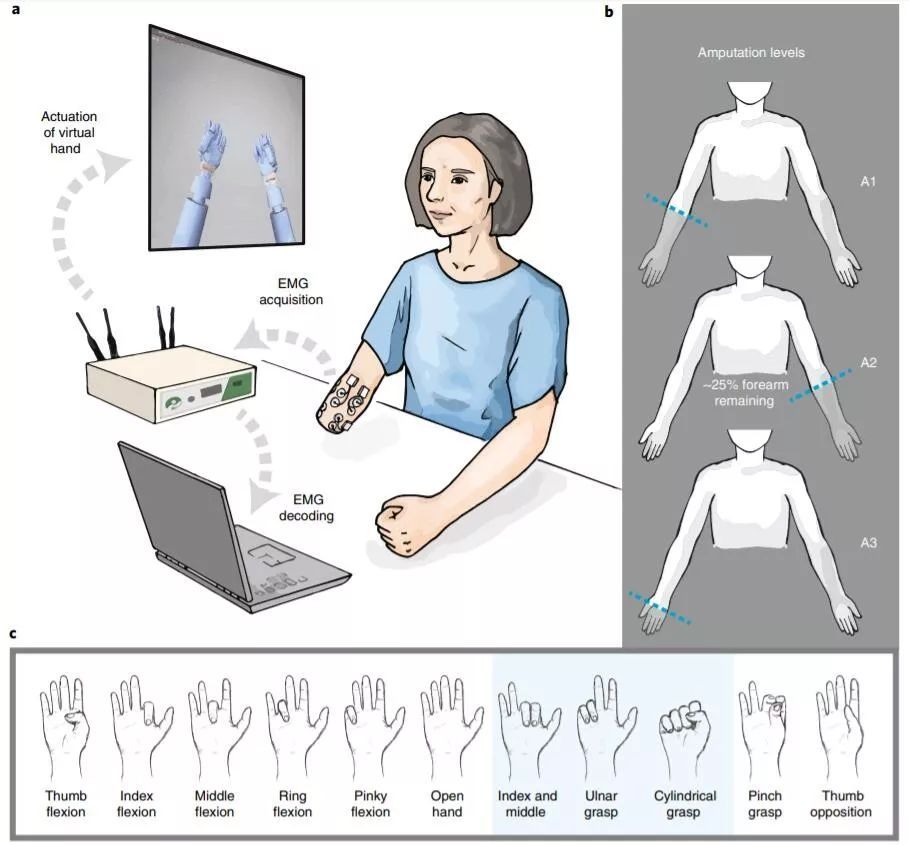
a:在線實驗中,4 名肢體健全和 3 名截肢受試者利用他們的表面機電信號控制一個虛擬的機械手。利用多層感知器對這些信號進行解碼,得到單位數關節角度的預測結果;
b:3 名截肢受試者的殘缺程度不同;
c:研究人員測試的肢體活動包含單位數和多位數活動。實驗結果顯示,除 A2 截肢受試者無法獨立做出食指和中指彎曲/延展動作之外,其他所有受試者都能做出 c 中的所有動作。
這一技術中用到的機器學習算法首次學習了如何解碼使用者的動作意圖並將這些脈衝信號轉換為假肢的手指運動。在訓練算法的過程中,被截肢者的手指動作通過綁在他們殘肢上的感測器傳遞給機器,以檢測他們的神經活動。通過這一過程,機器學習算法學習假肢部位的肌肉刺激與特定手部運動的對應關係。
訓練完成之後,被截肢者就可以將有意識的動作脈衝轉換為各個假肢手指的微調動作。該算法濾掉了與肢體運功無關的動作,只關心與運動緊密相關的動作。
「由於這些肌肉信號是有雜訊的,我們需要一種機器學習算法來提取有意義的肌肉活動並將其轉換為動作,」論文一作 Katie Z. Zhuang 解釋稱。
提高抓取靈活度
然而,僅僅依靠處理人類發出的信號,我們還遠不能以讓機械臂做到足夠靈活。對此,研究人員開發了另一種機器學習算法,用來幫助用戶抓取和操縱物體。
在機械手碰到物體之後,AI 算法就會讓手指閉合,抓住物體。這一自動抓取功能源自之前的研究,在這項研究中,機械手被用來感知物體的形狀,並僅基於接觸得到的信息實現抓取。
「當你手裡拿著一個物體,它開始鬆脫滑動,你只有數毫秒的時間做出反應,」EPFL 學習算法與系統實驗室的 Aude Billard 表示。「機器手能夠在 400 毫秒內做出反應。它的手指上佈滿壓力感測器,可以在大腦感覺到物體滑動之前做出反應並穩住物體。」
a:Allegro 機械手模擬器;b:共享控制策略。c:主動柔順接觸(共享)控制器的動作;d:共享控制的示例追蹤(受試者 B4)。其中,頂部一行顯示了無共享控制(左)和有共享控制(右)兩種情況下檢測到的總壓力值;e:受試者 B2 的握持實驗百分比;f:握持物體的時間維持在 7 秒;g:握持物體時遠節趾骨、中節趾骨和近節指骨的接觸。
華人一作
本論文的第一作者 Katie Z. Zhuang 本科畢業於約翰霍普金斯大學,並在杜克大學獲得了生物醫學/醫學工程的博士學位,這一研究是她在洛桑聯邦理工學院讀博士後期間的工作。目前,Katie Zhuang 任瑞士弗裡堡大學(University of Fribourg)研究科學家。






